深度和深度测试
深度其实就是该像素点在3d世界中距离摄象机的距离 , 深度值越大,则离摄像机越远。摄像机可能放在坐标系的任何位置,不能简单地说像素的z坐标越大或越小就是越靠近摄像机。
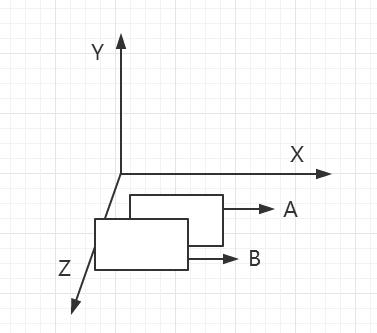
在不使用深度测试的时候,如果我们先绘制一个距离较近的物体,再绘制距离较远的物体,则距离远的物体因为后绘制,会把距离近的物体覆盖掉,这样的效果并不是我们所希望的。比如下图中的A、B,先绘制A,再绘制B,A就有一部分被B挡住。而有了深度缓冲以后,绘制物体的顺序就不那么重要了,都能按照远近(Z值)正常显示
启动深度测试
启动深度测试需要打开深度测试功能,调用glEnable(GL_DEPTH_TEST)打开,然后调用glDepthFunc(int func)方法指定深度测试模式。func可取以下值:
1
2
3
4
5
6
7
| - GL10.GL_NEVER:不通过
- GL10.GL_LESS:如果输入的深度值小于参考值,则通过
- GL10.GL_EQUAL:如果输入的深度值等于参考值,则通过
- GL10.GL_LEQUAL:如果输入的深度值小于或等于参考值,则通过
- GL10.GL_GREATER :如果输入的深度值大于参考值,则通过
- GL10.GL_GEQUAL:如果输入的深度值大于或等于参考值,则通过
- GL10.GL_ALWAYS:总是通过
|
通过表示会绘制,否则不绘制。比如设置坐标的点z位置为0.5
1
| private float[] mArray = { 0f, 0f, 0.5f };
|
设置深度为0.1
1
2
3
4
5
6
7
8
|
@Override
public void onSurfaceCreated(GL10 gl, EGLConfig config) {
gl.glClearColor(0f, 0f, 0f, 0f);
gl.glClearDepthf(0.1f);
}
|
在onDrawFrame中清除屏幕:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
|
@Override
public void onDrawFrame(GL10 gl) {
gl.glClear(GL10.GL_COLOR_BUFFER_BIT|GL10.GL_DEPTH_BUFFER_BIT);
gl.glEnableClientState(GL10.GL_VERTEX_ARRAY);
gl.glEnable(GL10.GL_DEPTH_TEST);
gl.glDepthFunc(GL10.GL_GREATER);
gl.glVertexPointer(1, GL10.GL_FLOAT, 0, mBuffer);
gl.glColor4f(0f, 1f, 0f, 0f);
gl.glPointSize(80f);
gl.glDrawArrays(GL10.GL_POINTS, 0, 1);
gl.glDisable(GL10.GL_DEPTH_TEST);
gl.glDisableClientState(GL10.GL_VERTEX_ARRAY);
}
}
|
指定深度测试模式为GL_GREATER,即如果输入的深度值大于参考值,则通过。这里0.5>0.1,通过。
如果把深度设置为1f
1
2
3
4
5
6
7
8
|
@Override
public void onSurfaceCreated(GL10 gl, EGLConfig config) {
gl.glClearColor(0f, 0f, 0f, 0f);
gl.glClearDepthf(1f);
}
|
此时0.5<1,不通过,则不会被绘制出来。